





Les moteurs brushless DC sont utilisés car ils sont efficaces, fiables et nécessitent moins d’entretien que les moteurs à balais. Ils utilisent une commutation électronique au lieu de balais, ce qui améliore le contrôle et réduit l’usure. Leurs performances dépendent de la conception du moteur, du calage, du retour d’information, de la méthode de contrôle, de l’électronique de transmission, du comportement vitesse-couple et des limites thermiques. Cet article donne des informations sur tous ces points.

Bases du moteur sans balais à courant continu
Qu’est-ce qu’un moteur DC sans balais (BLDC) ?
Un moteur à courant continu sans balais (BLDC) est un moteur à aimant permanent alimenté par une source DC qui fonctionne par commutation électronique plutôt que par des balais et un commutateur mécanique. Un contrôleur commute le courant à travers les enroulements du stator dans une séquence planifiée pour créer un champ magnétique rotatif. Le rotor contient des aimants permanents qui suivent ce champ rotatif, ce qui produit la rotation. Comme il n’y a pas de brosses frottant sur un commutateur, l’usure mécanique est réduite, l’entretien est moindre et l’efficacité est souvent supérieure. La vitesse et le couple sont contrôlés par la façon dont le contrôleur chronomètre la commutation et ajuste la tension et le courant.
BLDC vs DC brossé vs PMSM
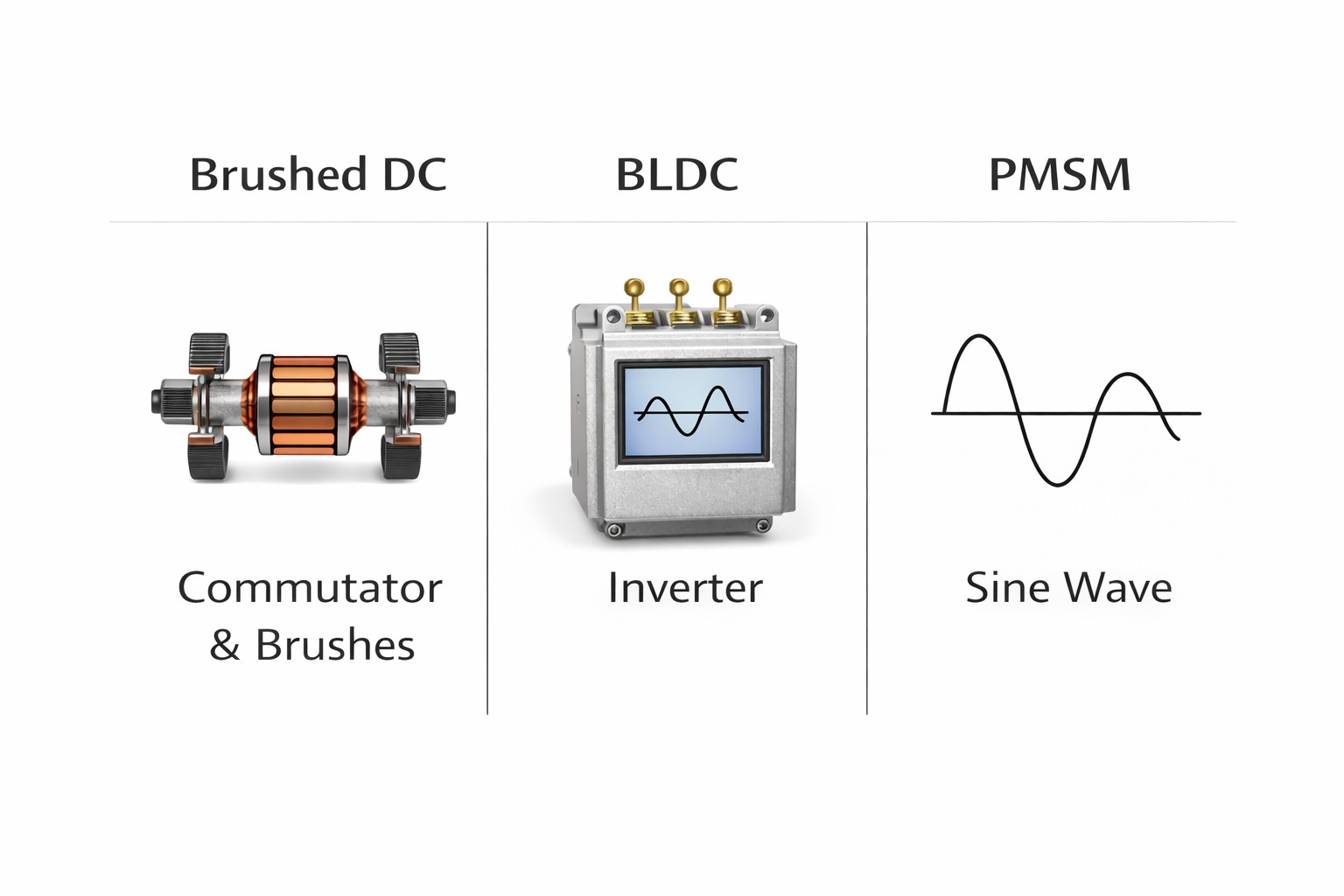
Les moteurs à courant continu à balais utilisent des balais et un commutateur pour commuter le courant à l’intérieur du moteur, ce qui simplifie le contrôle mais ajoute des pièces d’usure. Les moteurs BLDC retirent les balais et utilisent un contrôleur électronique pour changer les phases du stator, de sorte que la commutation est gérée électroniquement. Les moteurs PMSM utilisent également des aimants permanents et un contrôle électronique, ce qui permet à leur matériel de ressembler à celui d’un moteur BLDC. La différence commune réside dans la forme de la forme d’onde de tension du moteur et la manière dont le contrôleur pilote les phases. Les systèmes BLDC sont souvent associés à des formes d’onde trapézoïdales et à la commutation par étapes, tandis que les systèmes PMSM sont souvent associés à des formes d’onde sinusoïdales et à des méthodes de contrôle plus fluides.
Commutation électronique et synchronisation de commutation
Bases du fonctionnement d’un moteur DC sans balais
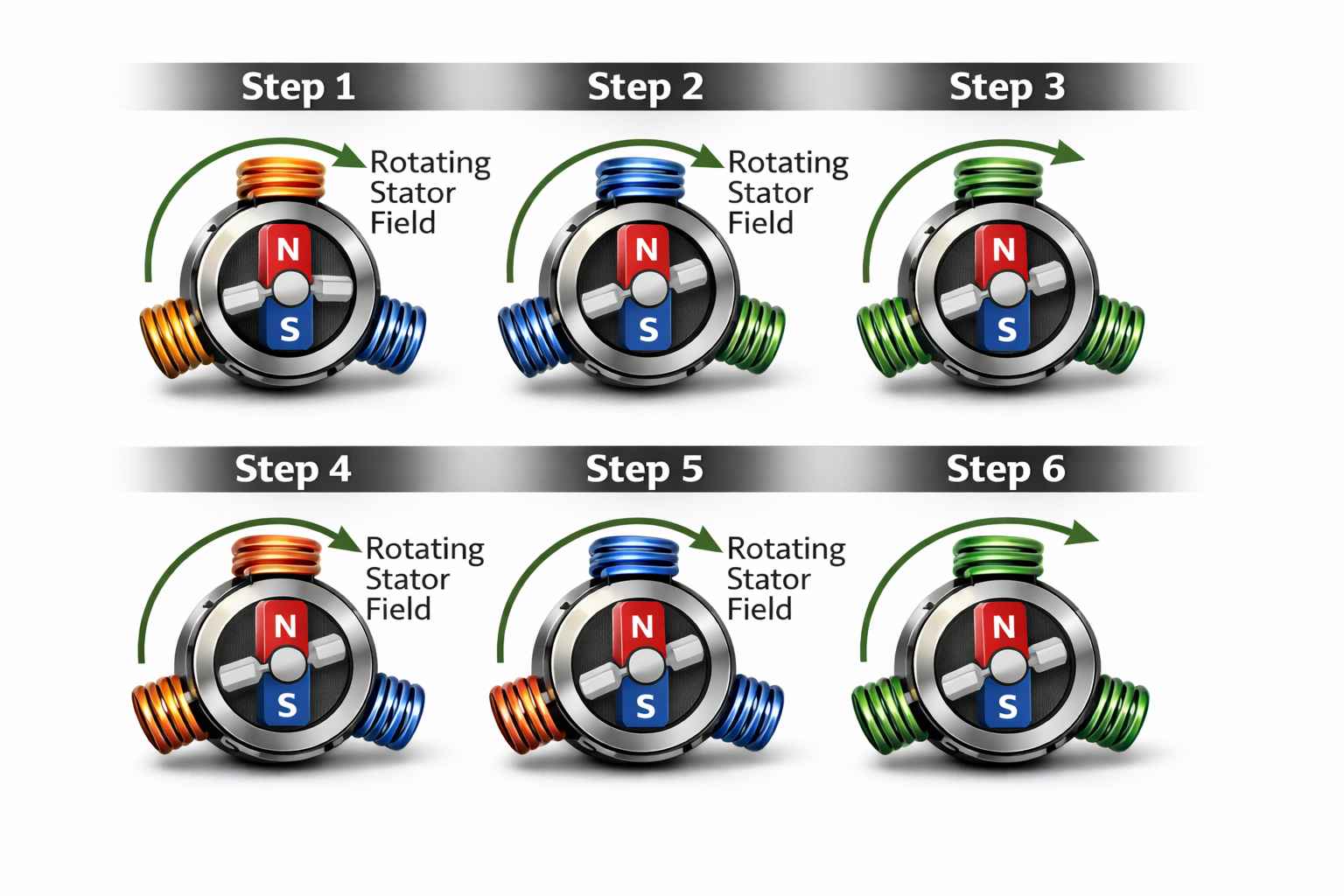
Un moteur BLDC crée un mouvement lorsque le courant dans les enroulements du stator produit un champ magnétique qui interagit avec les aimants permanents du rotor. Le contrôleur envoie le courant aux enroulements dans un ordre répété, de sorte que la partie la plus forte du champ magnétique du stator continue de se déplacer autour du moteur. Ce motif de changement agit comme un champ magnétique en rotation. Au fur et à mesure que le champ du stator se déplace, les aimants du rotor continuent de tourner pour rester alignés avec lui. Cette action de suivi stable est ce qui produit une rotation et un couple continus.
Synchronisation de commutation et ses effets
• Lorsque la commutation se produit trop tôt, le champ du stator domine la position du rotor et le couple s’affaiblit.
• Lorsque la commutation se produit trop tard, le champ du stator est en retard par rapport au rotor et la ride du couple augmente.
• Un calage de commutation correct améliore l’efficacité du couple et réduit le bruit et les vibrations.
Construction de moteurs BLDC et composants de noyau
Pièces principales du moteur
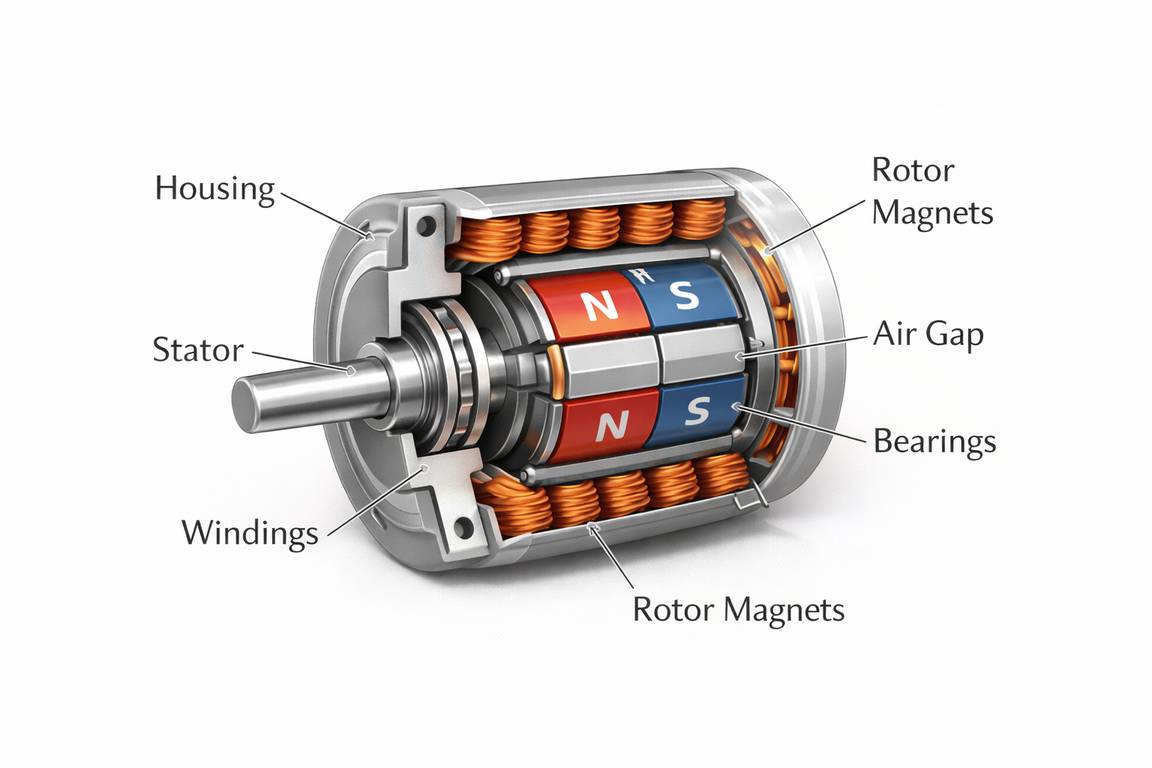
Un moteur BLDC se compose d’un stator, d’un rotor avec aimants permanents, d’un espace d’air, de paliers et d’un boîtier. Le stator est fabriqué en acier stratifié et possède des enroulements multiphasés qui génèrent le champ magnétique rotatif. Le rotor contient des aimants permanents qui suivent ce champ en rotation pour produire du mouvement. L’espace d’air entre le stator et le rotor affecte le couplage magnétique, la densité de couple et le fonctionnement fluide. Les roulements soutiennent l’arbre et influencent la friction, les vibrations et la durée de vie. Le boîtier maintient l’alignement de l’ensemble et aide à éliminer la chaleur du moteur.
Facteurs de conception du rotor
La conception du rotor influence le couple, le comportement de vitesse et la résistance mécanique. Le nombre de pôles détermine la relation entre la commutation électrique et la rotation mécanique ; Plus de poteaux améliorent le couple à basse vitesse mais nécessitent une commutation électrique plus rapide. Le placement des aimants affecte également les performances. Les aimants montés en surface sont courants et simples, tandis que les aimants intérieurs offrent une meilleure rétention mécanique à des vitesses plus élevées. Le matériau magnétique détermine la force magnétique et la stabilité de la température, influençant la capacité de couple et la fiabilité.
Connexions en enroulement : Star (Wye) vs Delta
Les enroulements du stator dans un moteur BLDC sont généralement connectés en forme étoile (wye) ou delta.
| Connexion | Effet pratique (typique) | Ce qu’il supporte |
|---|---|---|
| Étoile (Moisson) | Couple par volt plus élevé à basse vitesse | Fonctionnement plus fort à basse vitesse sur une tension limitée |
| Delta | Potentiel de vitesse plus élevé sur la même tension | Régime plus élevé lorsque la demande de couple est plus faible |
Options de détection de position du rotor et de rétroaction
Pourquoi le moteur a-t-il besoin de position du rotor ?
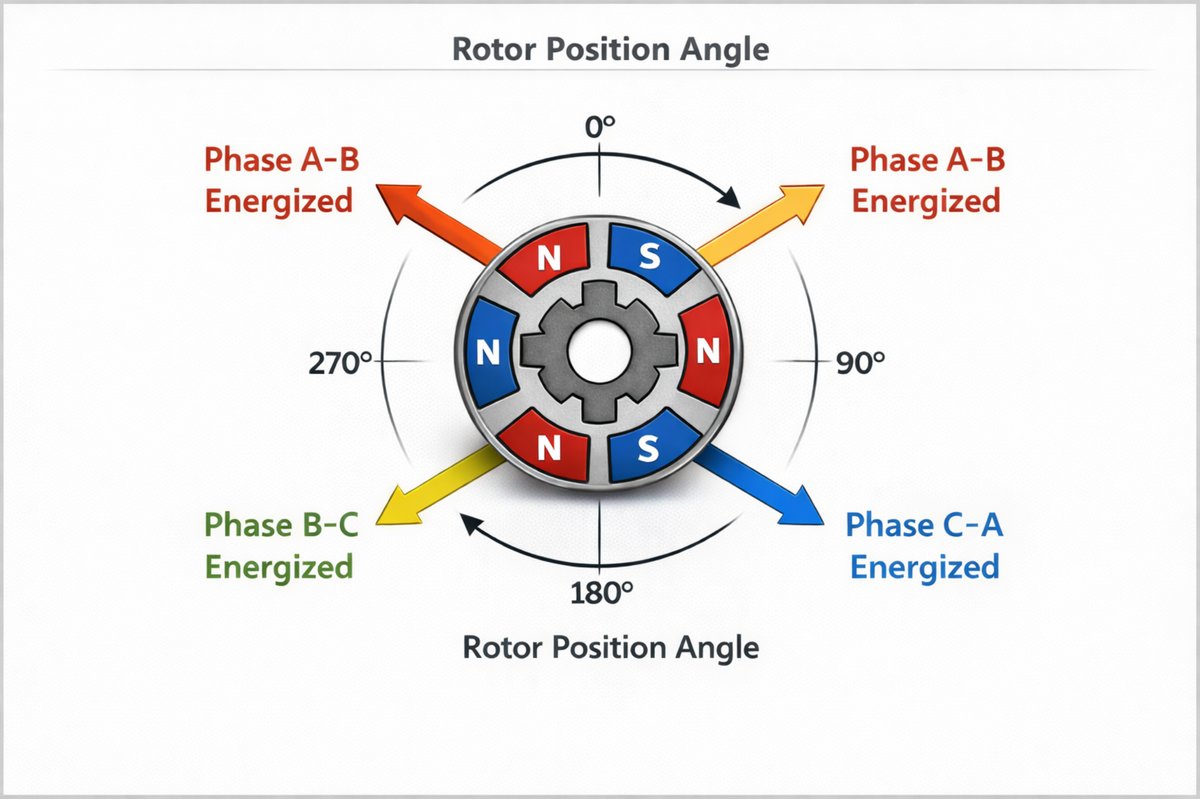
Le contrôleur doit connaître la position du rotor (ou l’estimer) afin de pouvoir activer les phases correctes au bon moment. Sans information sur la position du rotor, le calage de commutation dérive, le couple baisse et le chauffage augmente lors du démarrage et du fonctionnement à basse vitesse.
Capteurs Hall vs Encodeurs vs BLDC sans capteur
• Capteurs Hall : abordables et fiables pour la commutation de base et un couple de démarrage fort.
• Encodeurs/résolveurs : utilisés lorsque un contrôle précis de la vitesse/position est requis.
• Sensoriel (basé sur la contre-EMF) : moins de fils/pièces, mais plus dur à très basse vitesse et démarrage en raison d’une faible contre-EMF.
Méthodes de commutation et de contrôle du BLDC
Styles de commutation : 6-étapes vs sinusoïdal / FOC
| Méthode | Ce que fait la manette | Résultat |
|---|---|---|
| 6 étapes (trapèze) | Commute les phases en étapes discrètes | Simple et robuste ; Plus de rides/bruit possible |
| Sinusoïdal / FOC | Entraîne des courants de phase lisse en utilisant le contrôle vectoriel | Couple plus doux ; souvent plus silencieux et efficace sur une large plage |
Quand le 6-Step a du sens vs quand le FOC est meilleur
Les deux méthodes fonctionnent bien, mais elles sont choisies pour des objectifs différents.
• Le 6-step est souvent choisi lorsque la simplicité, le coût et la robustesse comptent.
• Le FOC est choisi lorsque le couple régulier, le faible bruit et un contrôle précis comptent sur une large plage de vitesses.
Électronique du système de propulsion BLDC
Pont à onduleur triphasé
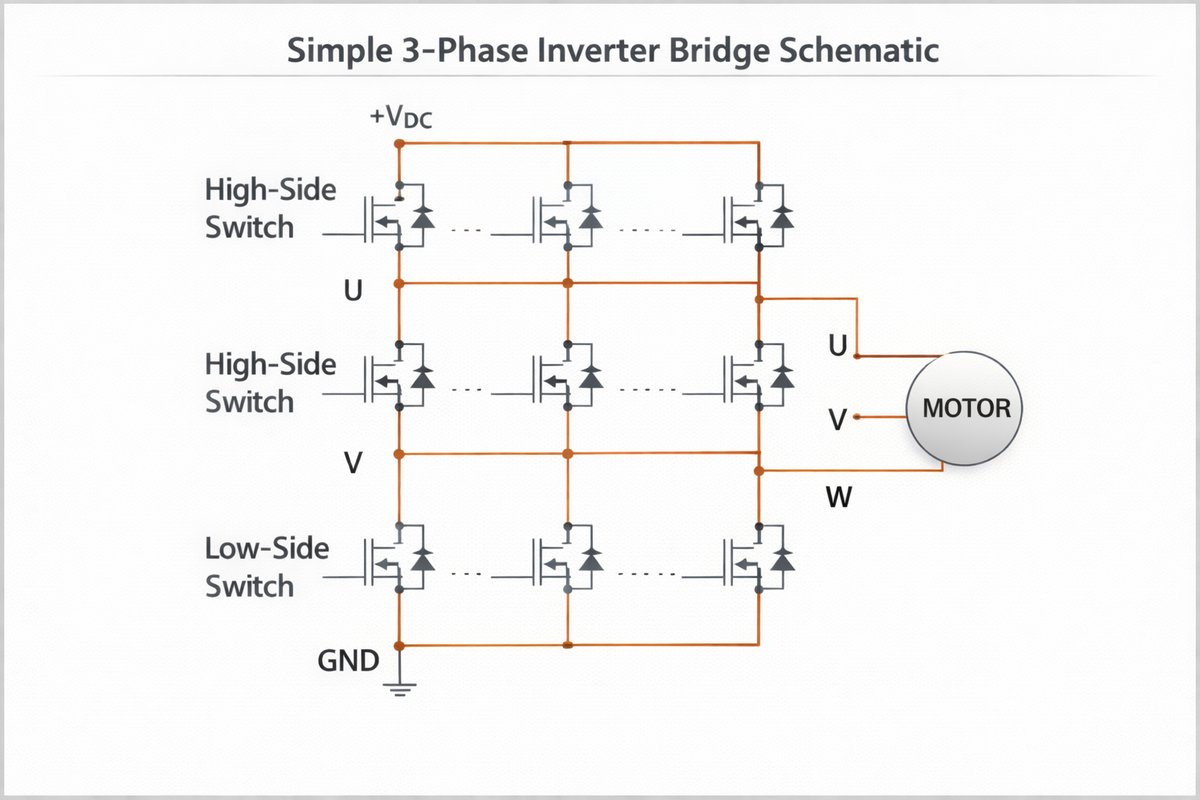
Un moteur BLDC a besoin d’un entraînement électronique pour effectuer la commutation. L’étage de puissance est un onduleur triphasé composé de six interrupteurs. En basculant ces dispositifs dans la bonne séquence, le propulseur aligne l’alimentation continue dans les phases moteur et produit un champ rotatif de stator.
Rôles de contrôleur
• Interrupteurs d’alimentation : MOSFET à de nombreuses plages de tension BLDC.
• Pilote de porte + protections : commutation sécurisée, contrôle des temps morts et gestion des pannes.
• Logique de contrôle (MCU/DSP) : synchronisation de commutation, contrôle PWM, lecture des capteurs et gestion des limites.
Vitesse, couple et freinage dans les moteurs à courant continu sans balais
Contrôle de la vitesse et du couple : PWM et limites de courant
Contrôle de la vitesse : Le cycle de service PWM modifie la tension continue effective du moteur, ce qui modifie sa vitesse.
Boucle de vitesse : Le contrôleur compare la vitesse cible à la vitesse mesurée ou estimée et corrige la sortie en cas d’erreur.
couple et courant : Le couple moteur est étroitement lié au courant de phase, donc limiter le courant limite aussi le couple.
Limitation de courant : Le disque surveille le courant et réduit la PWM lorsque nécessaire pour éviter les dommages lors des démarrages, arrêts et changements soudains de charge.
Inversion de direction et notions de base du freinage/régénération
• Inversion de direction : Le moteur peut tourner dans la direction opposée en inversant l’ordre de commutation, ce qui modifie la séquence de phase.
• Freinage : La transmission peut appliquer un couple opposé à la direction du mouvement pour ralentir le rotor de manière contrôlée.
• Régénération : Lors du freinage dans les bonnes conditions, le moteur peut agir comme un générateur et renvoyer de l’énergie vers le bus DC.
Le contrôle de direction, le freinage et la régénération proviennent tous de la façon dont le moteur change de phase et gère le courant. En modifiant la séquence de commutation et en contrôlant le couple, le même moteur BLDC peut fonctionner en avant ou en arrière, ralentir en douceur, et dans certains systèmes, renvoyer une partie de son énergie à l’alimentation.
Performance et limites des moteurs sans balais à courant continu
Comment la vitesse et le couple se comportent-ils dans un moteur BLDC ?
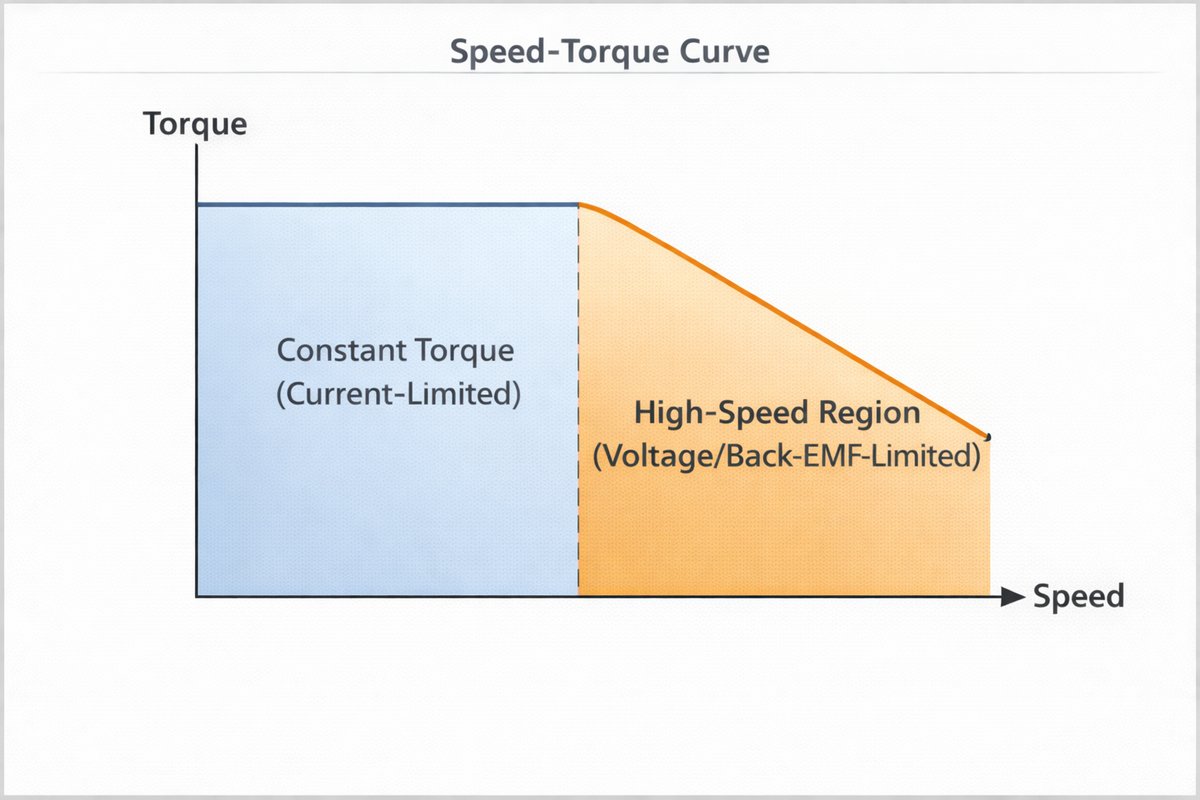
Un moteur sans balais à courant continu ne fournit pas le même couple à toutes les vitesses. À basse vitesse, le couple est limité par la capacité de courant de la transmission. À des vitesses plus élevées, le moteur atteint un point où la tension du bus DC et la contre-force électromagnétique limitent le couple que le moteur peut produire. Sur une courbe vitesse-couple, cela se manifeste par une région plate de couple presque constant à basse vitesse et une région de couple en baisse à plus haute vitesse.
Quels facteurs déterminent la vitesse maximale d’un moteur BLDC ?
• Tension sur le bus DC : Une tension plus élevée sur le bus DC offre plus de marge de manœuvre pour surmonter la contre-force électromagnétique à grande vitesse.
• Contre-électromagnétique (Ke/Kv) : La contre-force d’urgence augmente avec la vitesse et réduit la tension que le lecteur peut utiliser pour injecter du courant dans les enroulements.
• Méthode de contrôle : Différentes méthodes de contrôle influencent la capacité de maintien du couple par la transmission à mesure que la vitesse augmente.
• Thermique : Les pertes dans les enroulements et l’électronique augmentent avec la vitesse et la charge, limitant la durée maximale du moteur à grande vitesse.
Spécifications qui comptent le plus pour les moteurs à courant continu sans balais
| Terme spécifique (catalogue) | Qu’est-ce que ça vous dit ? Pourquoi c’est important | |
|---|---|---|
| Tension nominale / plage de bus DC | Plage de tension d’alimentation normale | Définit la plage de vitesse possible et aide à choisir le bon disque |
| Courant nominal/courant continu | Courant sûr pour une utilisation prolongée | Montre combien de chauffage se produira à une charge donnée |
| Puissance nominale (W) | Puissance de sortie à un certain point | Cela aide à comparer la puissance des différents moteurs |
| Couple nominal/couple maximal | Quelle force de rotation le moteur peut produire | Montre comment il gère les surcharges de démarrage et courtes |
| Vitesse (RPM) | Plage de vitesse normale de fonctionnement | Aide à faire correspondre le moteur aux engrenages et à la charge |
| Constantes Kv / Ke et Kt | Vitesse, tension et couple des liens | Relie la tension et le courant à la performance réelle du moteur |
| Efficacité | Quelle puissance d’entrée devient puissance mécanique | Affecte le chauffage, l’autonomie de la batterie et les coûts d’exploitation |
Rendement, pertes et chaleur dans les moteurs à courant continu sans balais
Sources de perte dans un moteur sans balais à courant continu
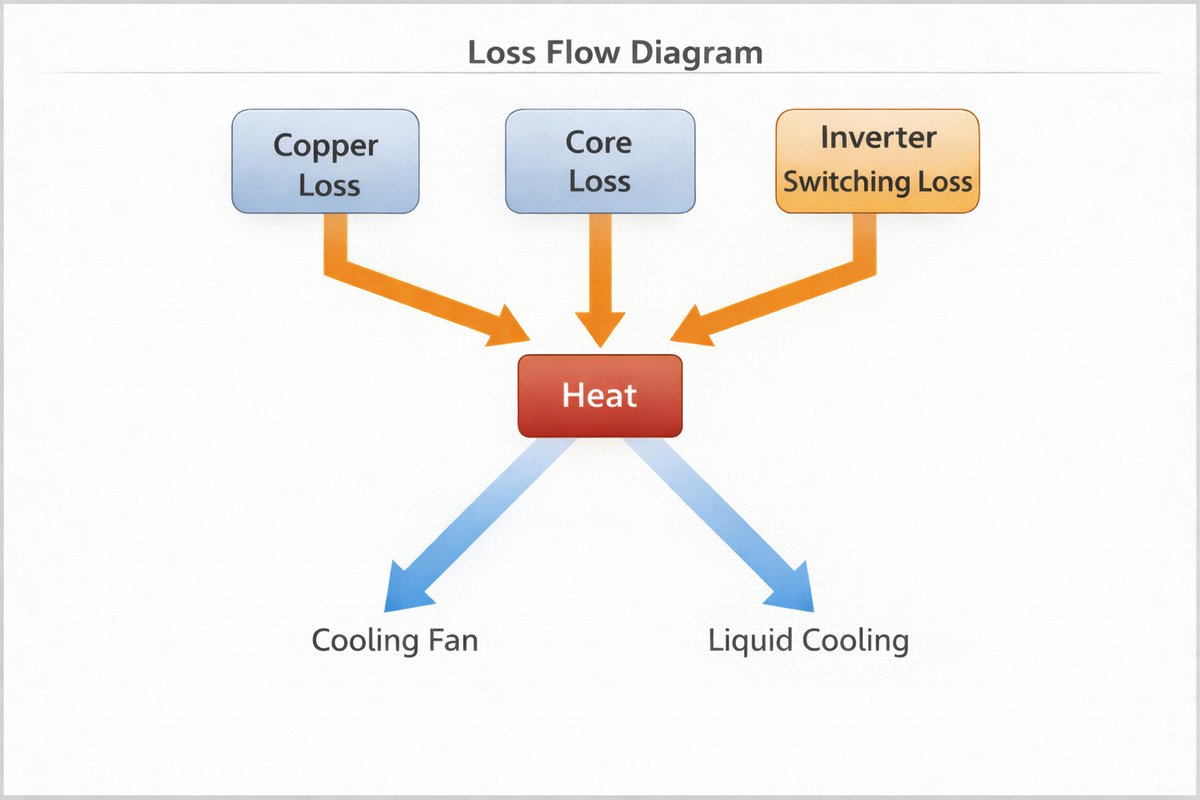
Dans un système de moteur à courant continu sans balais, toute la puissance d’entrée n’est pas convertie en sortie mécanique utile. Une partie se transforme en chaleur à l’intérieur du moteur et du conducteur. La majeure partie de cette chaleur provient des pertes en cuivre, des pertes en noyau et des pertes de commutation, et ces pertes augmentent lorsque le courant et la vitesse augmentent.
• Perte de cuivre (I²R) : La perte de cuivre se produit dans les enroulements du stator et augmente avec le courant. Un couple plus élevé nécessite un courant plus élevé, donc la perte de cuivre augmente avec la demande de couple.
• Perte de noyau ou de fer : La perte du noyau est liée à la variation du champ magnétique dans le stator. Il augmente avec la fréquence électrique et le niveau de flux, ce qui la rend plus nécessaire à des vitesses plus élevées.
• Perte de commutation : La perte de commutation se produit dans l’électronique de puissance qui entraîne le moteur. Cela dépend de la fréquence PWM, du type de dispositifs de commutation et du courant circulant lors de chaque événement de commutation.
Refroidissement et protection thermique dans les systèmes BLDC
Un contrôle thermique est nécessaire pour maintenir à la fois le moteur et l’onduleur dans des limites de fonctionnement sûres. La chaleur doit être éliminée par un chemin de montage thermiquement conducteur et un débit d’air adéquat, tandis que les limites de courant doivent être réglées de manière prudente lorsque le refroidissement est restreint ou que de longues périodes de fonctionnement sont prévues. La détection de température et le retour thermique peuvent protéger davantage le système en réduisant le courant lorsque les températures deviennent excessives, améliorant ainsi la fiabilité et la durée de vie utile.
Applications des moteurs à courant continu sans balais
Applications courantes des moteurs à courant continu sans balais
• Ventilateurs et ventilateurs pour l’air en mouvement
• Pompes pour déplacer des liquides
• Outils électriques et petites machines
• Systèmes d’automatisation et de mouvement
• Articulations robotiques et actionneurs
• Véhicules et dispositifs alimentés par batterie
Conclusion
Les moteurs sans balais à courant continu fonctionnent en combinant des aimants permanents avec un contrôle électronique pour produire un mouvement fluide et efficace. Leurs performances réelles dépendent d’un bon calage de commutation, d’une rétroaction de position du rotor, d’une méthode de contrôle, du fonctionnement de l’onduleur, du refroidissement et d’une adaptation correcte moteur-entraînement. La vitesse, le couple, l’efficacité et la fiabilité sont tous affectés par ces facteurs. Les comprendre aide à comprendre comment fonctionnent les systèmes BLDC, leurs limites et ce qui influence la performance à long terme.
Foire aux questions [FAQ]
Comment un moteur BLDC sans capteur démarre-t-il à l’arrêt ?
Cela commence par forcer le rotor dans une position connue, puis le moteur fait tourner en boucle ouverte. Une fois que le moteur atteint une vitesse suffisante pour la détection de contre-électromagnologie, le contrôleur passe au fonctionnement normal sans capteur.
Qu’est-ce qui cause le bruit et les vibrations dans un moteur BLDC ?
Le bruit et les vibrations sont causés par un déséquilibre du rotor, un désalignement, des roulements usés, le couple de pignage, des espaces d’air inégaux et la commutation PWM.
Comment l’inertie de charge affecte-t-elle un moteur BLDC ?
Une forte inertie de charge ralentit l’accélération et la décélération du moteur. Il augmente également la demande de couple et peut augmenter le courant lors de changements de vitesse rapides.
Quelles sont les prises d’alimentation et câblage qui comptent dans un système BLDC ?
L’alimentation doit supporter le courant de pointe sans chute de tension. Les condensateurs doivent lisser les pics de commutation, et le câblage doit être correctement dimensionné, court et bien mis à la terre pour réduire le bruit.
Quelles fonctions de protection sont utilisées dans les disques BLDC ?
Les lecteurs BLDC utilisent une protection contre les surcourants, surtensions, sous-tensions, courts-circuits, calages et surchauffes pour éviter les dommages.
Comment les conditions environnementales affectent-elles un moteur BLDC ?
La poussière, l’humidité, la chaleur, les vibrations et les conditions corrosives peuvent réduire les performances, endommager des pièces et raccourcir la durée de vie du moteur.









